Ankara
Az Bulutlu
11°C
Ankara
11°C
Az Bulutlu
Perşembe
Az Bulutlu
9°C
Cuma
Az Bulutlu
8°C
Cumartesi
Az Bulutlu
8°C
Pazar
Az Bulutlu
7°C
Sun Savunma Net olarak bağımsız içeriklerimizi ücretsiz sunabilmek için reklam gelirlerine ihtiyaç duyuyoruz. Lütfen sitemizi desteklemek için reklam engelleyicinizi devre dışı bırakın ya da sitemizi beyaz listeye (whitelist) ekleyin.

Yazarlar: John A. Sauter, Robert S. Mathews, Kris Neuharth, Joshua S. Robinson, John Moody, Stephanie Riddle
Çeviren: Ercan Caner, Sun Savunma Net,

Günümüzde ortaya çıkan küresel çaptaki yeni tehlikeler, askeri ve sivil tesisleri sürekli değişen ve gelişen yeni tehditlere maruz bırakmaktadır. Üretim, depolama, petrol/doğal gaz nakil hatları, enerji santralleri, bilgi ve ulaştırma maksatlı kullanılmakta olan bütün uluslararası altyapı ve tesisler, özellikle terör tehditlerine karşı etkili bir şekilde korunma ihtiyacındadır. Bu tesislerin çok fazla sayıda ve değişken yapı ve özelliklerde olmaları ile büyüklükleri, konvansiyonel korunma tedbir, yaklaşım, sistem ve yöntemlerinin etkin ve verimli bir şekilde kullanılmasına engel olmaktadır.
Günümüzde halen kullanılmakta olan insansız uzaktan algılama ve izleme sistemleri, genellikle bu tür tesislerin korunma derecesini, sınırlı insan gücü ile büyük oranda artıracak imkân ve kabiliyetler sağlamaktadırlar. Hâlihazırda kullanılmakta olan insansız sistemler, genel olarak her bir platform için birden fazla operatör kullanılmasını gerektirmektedir. Gelecekteki sistemlerde ise, düzinelerce sistemin kullanılabilmesi için sadece tek bir operatöre ihtiyaç duyulacaktır. Bunun başarılabilmesi için, otonom kontrol, koordinasyon, iletişim ve operatör ara yüzlerinin gelişmesini sağlayan inovatif teknolojilere ihtiyaç duyulmaktadır.
Anayurt güvenliğine yönelik yeni risk ve tehditlerin ortaya çıkması, çok uzun ve sarp araziler üzerindeki sınırların izlenmesi ile gözlem görevleri ve kritik tesislerin etkin bir şekilde korunma ihtiyacı, insansız araçlar üzerine yerleştirilen inovatif uzaktan algılama ve izleme sistemlerinin kullanılmasını gerektirmektedir. Bu sensörler ve platformlar, birlikte çalışmalarını güvenilir bir şekilde koordine edebilen, sağlam otonom kontrol teknolojilerine ihtiyaç duymaktadır. Bu maksatla; akıllı, karmaşık ve süratli davranışları mümkün hale getiren, sayısal feromonlara dayanan algoritmalar geliştirilmiştir.
Bu algoritmalar, değişik insansız sistemler ile sensör platformları üzerine uygulanmış ve gözlem ile tesis ve altyapı koruma uygulamalarında işe yaradıkları ispatlanmıştır. Geliştirilen algoritmalar, hızla değişen ortam, arızalar veya sensör kompozisyonunda meydana gelen değişimlere de otonom olarak ayak uydurabilmektedirler. Geliştirilen algoritmalar, karışık insanlı ve insansız tim ortamlarında da çalışabilmekte ve operatör kullanıcı Arayüzü, bir operatörün sistemi izlemesi ve yönetmesine imkân sağlamaktadır.
Küresel Konumlama Sistem sinyalleri veya pahalı sensör cihazları olmaksızın, hava ve kara esaslı robotik araçların birlikte çalışmalarına imkân sağlayan sistem, Kore’de bulunan Yonsei University tarafından geliştirilmektedir. Geliştirilen sistem, insansız olarak, çiftliklerden korunması gereken kritik tesislere kadar çok geniş bir yelpazede kullanıma imkân sağlamaktadır.
Doğada karşılaşılan sürü teknikleri tamamen basit kurallara dayanmaktadır. Arılar, karıncalar ve termitler, bireysel olarak akıllı olmasalar da koloni olarak hareket ettiklerinde olağanüstü karmaşık ve akıllı davranışlar sergileyebilirler. Kolektif olarak etkin ve verimli bir şekilde, yiyecek arama ve bulduklarında, yiyeceği en optimum rotayı kullanarak yuvalarına götürmeyi başarabilirler. Arılar yeni yuva yerini deneme-yanılma yolu ile kolektif olarak seçebilirler. Karıncalar iş birliği yaparak, kendilerinden çok daha büyük avları öldürüp yuvalarına taşıyabilirler. Termitler çok büyük yapılar inşa edebilirler ve karıncalar, kendi vücutlarını kullanarak su üzerinde köprüler veya yüzer geçiş yapıları inşa edebilirler.
Bahsedilen kolektif davranışlar, karmaşık toplumsal davranışlara yol açan, bireysel seviyedeki basit kurallar nedeniyle ortaya çıkarlar. Bir karınca kolonisi zamanla, bir araya gelerek bir yiyeceği yuvalarına götürecek en optimum yolu belirleyebilir, bunun nedeni her bir karıncanın yuvasına dönerken yolda bıraktığı izlerdir. Daha kısa olan rotadan, çok daha fazla karınca, daha kısa sürede yuvaya ulaştığından, yolda daha fazla iz bırakılır ve bu durum, daha fazla sayıda karıncanın aynı rotayı kullanmasına neden olur. Bireysel olarak hiçbir karınca en kısa rotayı bilemez, fakat kolektif olarak hareket ettiklerinde, koloni en kısa rotayı belirleyebilir ve yiyecek taşırken etkin ve verimli bir şekilde bu rotayı kullanabilir.

Hayvanlar, kendi aralarında açık ve gizli olmak üzere birçok haberleşme yöntemleri kullanırlar. Arılar potansiyel yiyecek yeri üzerindeki ilgi seviyelerini göstermek için sallanarak dans ederler, kurtlar vücut lisanı ve uluyarak sürü içerisinde haberleşirler. Gizli haberleşme de hayvanlar arasındaki iletişimde büyük bir rol oynar. Kuş, balık ve çeşitli hayvan sürüleri, kendi aralarındaki açık iletişim sinyalleri nedeniyle bir arada kalmazlar, bir arada sürü olarak kalmalarının nedeni, her bir hayvanın hareketlerini etrafındaki diğer hayvanlara göre ayarlamasıdır. Bir kurt sürüsü saldırıya geçtiğinde, senkronize bir bütün olarak hareket eder, bunun nedeni her bir kurdun hareketlerini diğer kurtlara göre ayarlamasıdır. Bu tür kolektif davranışların, askeri eğitim ve tatbikatlar ile iyi eğitilmiş bir ateş timinin, aralarında az bir iletişim veya açık bir haberleşme vasıtası ile koordineli bir taarruz icra ederken uyguladıkları taktiklerden bir farkı yoktur.
Hayvanlar arasındaki önemli iletişim yöntemlerinden bir tanesi, hayvanların çeşitli izler bırakarak sürünün diğer üyelerini uyarmak suretiyle çevrelerini değiştirdikleri ‘‘stigmergy-iz bırakarak’’ haberleşmedir. Bir karıncanın bıraktığı feromon, yani kimyasal iz, stigmery iletişimine güzel bir örnektir, benzer şekilde termitler de yapılar inşa ederken ortama kimyasal izler (feromonlar) bırakırlar.
Otonom kontrolün sağlanabilmesi maksadıyla, sayısal feromonlara dayanan akıllı grup yaklaşım algoritmaları geliştirilmiştir. Doğada incelenen örnekler, akıllı grup yaklaşımı sergileyen sistemlerin, bireysel olarak her bir sistem basit ve akıllı olmasa da atak, karmaşık ve akıllı davranışlar sergileyebildiğini ortaya koymaktadır (1). Feromon alanlarda, sosyal böceklerin davranış ve hareketlerini koordine etmek için kullandıkları kimyasal izlere benzer sayısal feromonlar modellenmiştir. Sayısal feromonlar, tıpkı doğadaki sosyal böceklerde olduğu gibi insansız sensör sistemlerinin, gözlem ve kritik tesis koruma görevlerinde hareketlerinin kontrol ve koordinasyonu maksadıyla kullanılabilmektedir.
Bu sürü algoritmaları, hızla değişen tehditlere süratle adapte olabilecek şekilde, otonom ve dinamik olarak tasarlanmalarının yanı sıra, sistemde meydana gelen arızalar ve sensör kompozisyonundaki değişimlere de süratle ayak uydurabilmektedirler. Bütüncül ve koordineli bir güvenlik şemsiyesi oluşturabilmek maksadıyla; kesintisiz olarak insan devriye unsurları ve izleme görevindeki personel ile iş birliği içerisinde hareket etmektedirler.
Artan güvenlik riskleri ile baş etmek, güvenlik sistemleri ve personeli üzerine oldukça ağır yükler bindirmektedir. Hâlihazırda pazarda mevcut olan gelişmiş sensör sistemleri bir arada kullanıldıklarında; Arama, Yer Belirleme, İzleme, Ateş Altına Alma, Angaje Olma ve Değerlendirme gibi bütün güvenlik görevlerini yerine getirebilmektedir. Fakat korunması ve gözlem altında tutulması gereken yerlerin çokluk, çeşitlilik ve büyüklükleri göz önüne alındığında; bütün alanların tam olarak korunabilmesi, ekonomik açıdan oldukça maliyetli olmakta ve mevcut sensörlerin kullanımı ile tam bir koruma ne yazık ki sağlanamamaktadır.
İnsanların, geniş alanların korunma ve gözetlenmesi görevlerinde, 7/24 kamera görüntüleri ve sensör verilerini izlemek için kullanılmaları, ekonomik açıdan uygun değildir. Geleceğin başarılı ve etkin güvenlik sistemleri, büyük oranda sensör verilerine dayanmak ve insanların ham sensör verilerini izlediği güvenlik ve gözlem sistemlerine daha az bağımlı olmak zorundadır. Otonom mobil sensör platformları, sensör kapsama alanlarını maksimize ederek ve insan operatörlere bağımlılığı azaltarak, insanların üzerinden 3D (Dull-Dirty-Dangerous: Sıkıcı-Kirli-Tehlikeli) gözlem ve tesis koruma görevlerini alabilirler. Bu platformların akıllı bir şekilde koordinasyon ve kontrolü, sınırlı sensör verilerinin daha verimli kullanılması suretiyle, akıllı düşman unsurlarına karşı etkinliklerini azami seviyeye çıkarmak mümkündür.
Tipik bir tesis koruma konfigürasyonunda, kuleler üzerine yerleştirilen sensörler, kablo ile yere bağlı balonlar ve insansız hava araçları, korunması planlanan tesis, boru hattı veya sınır gibi yerlerde geniş alan kapsaması sağlamaktadır. Kara sensörleri veya saldırganları tespit eden çeşitli kameralar, korunacak alanın dış çevresine ihlalleri tespit etmek maksadıyla yerleştirilebilirler. Görülebilir ve kızıl ötesi kameralar ile radar sensörleri, davetsiz misafirleri tespit ve izlemek maksadıyla kullanılabilirler. İnsan, hayvan ve İnsansız Kara Araç (UGV-Unmanned Ground Vehicle) devriyeleri, korunması planlanan alanın çit içerisinde kalan bölümünde devriye görevleri icra edebilirler. Mevcut bütün sistemler, bir saldırganın tanımlanma, önlenme veya caydırılmasında oldukça hızlı tepki göstererek, etkili önlemler alınmasını sağlayabilirler.
Yere yerleştirilen bir tökez teli sensöründen alınan sinyal, bir saldırganın veya davetsiz misafirin habercisidir. Hâlihazırda kullanılmakta olan kara sensörleri, saldırganların potansiyel tehdit tipleri (insan veya araç gibi) ve konumları hakkında tam olarak kesin bilgi sağlamamaktadırlar. İlave bilgiler, saldırganın en yakınında bulunan ve onun konum, ilerleme yönü, hızı ve kimliği hakkında daha hassas veriler sunan bir sensörden alınmak zorundadır. Saldırganların dost veya düşman olduklarının daha kesin belirlenebilmesi veya tespit edilmeleri sonrasında, sürekli olarak izlenebilmeleri maksadıyla ilave sensörlerin kullanılması da gerekebilir.
Sabotaj maksadıyla birçok yönden, aynı anda yapılan saldırılarda ve düşman tarafından aldatma ve gizleme tedbirleri uygulandığında, kullanılan sensörler süratle değişen durumlara adapte olmak ve değişken önceliklerde birçok görevleri aynı anda yerine getirmek zorunda olduklarından, güvenliğin sağlanması iyice zorlaşmaktadır. Son olarak, öldürücü veya öldürücü olmayan silah sistemlerinin (insanlı veya insansız) tehdidi caydırmak veya etkisiz hale getirmek maksadıyla kullanılmaları da gerekebilmektedir.

Sensörler ve platformlar, kendilerini kontrol eden yazılım programlarının bazı özelliklere sahip olmalarını gerektirmektedirler.
Çoklu Sensör Tipleri ve Kabiliyetleri — Gözlem sistemleri; optik (görülebilir ve kızıl ötesi spektrumda), sismik, akustik ve radar sensörlerini kapsamaktadır. İlave olarak Kimyasal, Biyolojik, Radyolojik, Nükleer ve Patlayıcı (CBRNE – Chemical, Biological, Radiological, Nuclear and Explosive) sensörler de belirli tiplerdeki tehlikeleri tespit etmek maksadıyla kullanılabilirler. Her bir sensörün farklı çözünürlük, tespit, yer belirleme ve farklı arazi ile meteorolojik şartlardaki hedef çeşitleri hakkında optimum verileri (mesafe, hız, oryantasyon, hedef üzerinde zaman vs. gibi) elde edebilmek için değişen performans kabiliyetleri bulunmaktadır. Spesifik oryantasyon veya zamansal sınırlamaları olan birçok sensörün, bir arada ve koordineli olarak çalışabilmesi için sensör füzyon algoritmalarının kullanılmasına gereksinim olabilir.
Çoklu Sensör Platformları ve Platform Kabiliyetleri — Sensörler, taşınabilir kara, hava veya deniz araçları üzerine veya gözlem kameraları gibi sabit veya açısal ve düşey düzlemde hareket edebilen sabit platformlar üzerine yerleştirilebilirler. Platformlar, değişen hız, irtifa, hareketlilik, havada kalış süreleri ve olumsuz hava ve arazi şartlarında farklı sınırlamalara sahiptirler.
Değişen İletişim Kabiliyetleri — Sensör verileri işlenmek ve zaman açısından kritik önemde olan bilgiler ana üsse gönderilmek zorundadır. Ağa bağlı cihazlar arasındaki koordinasyon da iletişim ihtiyacı gerektirmektedir. Sensör platformlarının değişken iletişim kabiliyetleri ve güç sınırlamaları bulunmaktadır ve her zaman ağ ile sürekli bir temas halinde olmayabilirler. Network kapsamındaki bütün sensörler ile olan iletişimin sürdürülmesi ve zamanında yapılabilmesi maksadıyla, sürü içindeki hareketli elemanları konfigüre etmek için sürü algoritmaları kullanılması gerekebilir. İletişim hataları ve gecikmeleri engellenmelidirler.
Güvenlik Sınırlamaları — Diğer insansız hava ve kara sistemleri ile havada ve/veya karada çarpışmalardan kaçınılması gereklidir. Sadece donanım yöntemleri yeterli olmadığında, ilave güvenlik faktörleri, algoritma tasarımlarına entegre edilmelidir.
Donanım Hataları ve Arızaları — Sensörlerde meydana gelen hatalar, birçok problemin ortaya çıkmasına ve olası çarpışmalara neden olabilir. Sistem unsurlarından herhangi bir tanesinin, kısmi veya tam arızası, operasyonun sürekliliğini sağlamak maksadıyla network tarafından giderilmelidir.
Enerji Kullanımı — Uzun süre belirli alanlar üzerinde görev yapması planlanan küçük ve dağıtık platformlarda, enerjinin korunması kritik öneme sahiptir. Dönüşler ve tırmanışlar daha fazla güç tüketerek, etkili menzil ve insansız sistemlerin istasyon/hedef üzerinde kalış sürelerini azaltırlar. Sürü algoritması, insansız sensör platformlarının hareketlerinin nasıl kontrol edileceğini belirlerken, enerji maliyetini de dikkate almak zorundadır.
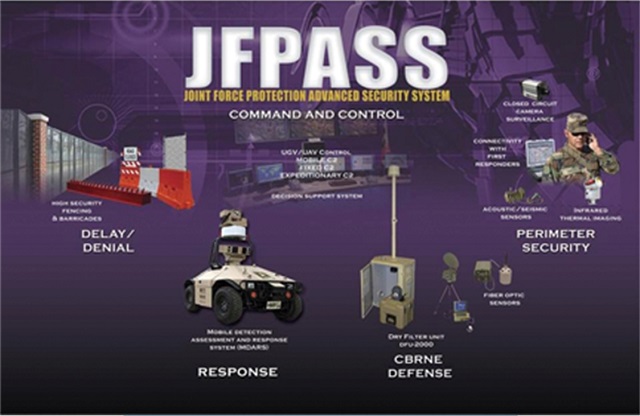
Askeri güvenlik sistemleri yıllar sonra giderek artan bir önem kazanmış ve bu alanda yeni uygulamalar askeri tesislerin güvenliğini sağlamak maksadıyla yaygın olarak kullanılmaya başlanmıştır. Örneğin IBDSS (Integrated Base Defense Security Systems – Entegre Üs Savunma Güvenlik Sistemi), JFPASS (Joint Force Protection Advanced Security System – Müşterek Kuvvet Koruma Gelişmiş Güvenlik Sistemi) gibi sistemler, askeri birlikler tarafından giriş kontrolü ve çevre emniyetinin sağlanması maksatlarıyla kullanılmaktadırlar. IBDSS ve JFPASS güvenlik sistemleri esas olarak, çeşitli güvenlik sensör ve platformlarını bir araya getiren mimari yapılardır ve kullanıcılara çeşitli sensörler tarafından sağlanan ortak resmi sunarlar.
Bazı araştırmacılar, iş birliği içinde çalışabilen otonom insansız araçların kullanıldığı güvenlik sistemleri üzerinde çeşitli araştırmalar yapmışlardır (2). İnsansız hava ve kara araçları; yol koruma, keşif ve çevre koruma senaryolarında kullanılmışlardır. Entegre üs savunma sistemlerine, uzaktan tespit ve tepki vermeyi sağlayan, telsiz, öldürücü olmayan silah sistemleri ve operatörün kontrolünde olan öldürücü caydırıcı mekanizmaların eklendiği platformların kullanıldığı örneklere de güvenlik uygulamalarında rastlanmaktadır (3).
Güvenlik sistemleri gelişmekte olan teknolojiden azami ölçüde faydalanıyor olsalar da ‘‘İlk Gören, Anlayan ve Tepki Gösteren Ol’’ yaklaşımı göz önüne alındığında, entegre sürü operasyonlarının güvenlik sistemlerine entegre edilmesi, günümüzde artık bir zorunluluk haline gelmiş durumdadır (4).

Sürü konsepti ile çalışan bir güvenlik sistemi, doğru sensör ve platformları, F2T2EA (Find, Fix, Track, Target, Engage and Assess – Bul, Belirle, İzle, Hedef Al, Angaje Ol ve Değerlendir) konseptine uygun oryantasyon destek unsurları ile doğru yere yöneltme imkân ve kabiliyetinde olmalıdır (5-8).
Doğada rastlanan böcek davranışlarını esas alan (9-10); rota planlama, koordinasyon, çoklu sensörlerin konumlandırılması (11), gözlem, hedefin izlenmesi, takip (12), hareketli ve geçici ağlarda görüş hattı iletişiminin muhafazası (13) gibi sayısal feromonlara dayanan bir dizi algoritma, sürü gözlem sistemleri geliştirilmesinde kullanılabilir.
Sayısal feromonlara dayanan sürü sistemleri, sürü elemanları basit ve bireysel olarak akıllı olmasalar da canlı, gelişen durumlara süratle ayak uydurabilen ve akıllı sürü davranışları oluşturmakta kullanılmaktadır. Doğadaki böcek davranışlarını yansıtan sayısal feromonların, gözlem ve kritik tesis koruması gibi gerçekçi senaryolarda, PTZ (Pan-Tilt-Zoom) kameralar, kara sensörleri, küçük insansız hava ve kara araçları gibi uygun donanımla kullanılması, güvenilir emniyet sistemleri üretilmesini sağlamaktadır.
Sayısal bir feromon, sistem ve içinde bulunduğu ortamla ilgili çeşitli bilgileri göstermektedir. Feromonların farklı çeşitleri, değişik türdeki bilgilerin iletilmesini sağlamaktadır. Sensör platformlarının kontrol edilmesinde kullanılan beş ana feromon çeşidi bulunmaktadır:
Bu feromonlar, belirli bir bölge üzerinde grid haritası üzerine yerleştirilirler. Aynı türden bütün yeni feromonlar birbiri üzerine ilave edilirler. Her bir grid hücresindeki feromonun, belirli bir fraksiyonuna ait her saykıl, harita üzerindeki komşu hücrelere yayımlanır ve standart denklemler (12) kullanılarak, bir feromonun belirli bir kesiti uzaklaştırılır veya yok edilir. Yayımlama ve yok etme sonrasında uygulanan düzenli yüklemeler, kalıcı ve istikrarlı feromon alanlarının muhafaza edilmesini sağlarlar. Bu iki feromon; bilgi yayımını sağlamakta ve harita üzerinde güncel bilgilerin muhafaza edilmesini kolaylaştırmaktadır.
Sürü algoritması, taşınan sensörler tarafından kapsanması gereken alanları planlar. Her bir sensör, kapsadığı alanı gösteren özel bir kapsama alanı ayak izine sahiptir. Sürü algoritması, aşağıda belirtilen üst seviyeli hedeflere karşı farklı potansiyel rotaları değerlendirmektedir:
Bu üst seviyeli hedefler, sürü kararlarını vermek üzere, daha belirgin ve hassas Maliyet/Fayda formülüne dönüştürülmektedir (14).
Operatör Sistem Arayüzü (OSI – Operator System Interface), tek bir operatörün, farklı tip gözlem uygulamalarında, birçok sensör platformunu izlemesi ve yönetebilmesi maksadıyla geliştirilmiştir. OSI, sistem kapsamındaki bütün unsurların yer ve statülerinin görsel olarak görülmesini sağlayan, coğrafi esaslı bir kontrol ve görüntü sistemidir. OSI tarafından sağlanan görüntüler aşağıdadır:
İlgi sahasının kuş bakışı görüntüsünde, bütün insansız hava ve kara araçları, kara sensörleri, PTZ kameralar ve insanlı devriyelerin yanı sıra hedeflerin belirlendikleri yerler ve nitelikleri de gerçek zamanlı olarak gösterilmektedir (Şekil 1’e bakınız). OSI aynı zamanda, sistemin sıhhatli çalışmama durumu veya saldırganların tespiti gibi olaylar meydana geldiğinde sesli ipuçları da sağlamaktadır. OSI tasarımında, sürünün yönetilmesi ve Arayüzün kendi kendini konfigürasyonu gibi operatör ihtiyaçlarını dikkate alan insan faktörleri göz önüne alınmıştır.
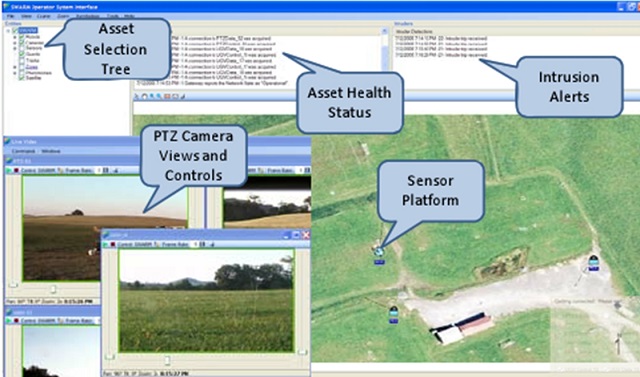
Operatör Kullanıcı Arayüzünün konfigürasyonu ve spesifik ihtiyaçlara uygun hale getirilmesinde kullanıcı çok büyük bir esnekliğe sahiptir. Kullanılacak kapasite seçimi (Asset Selection Tree) ekranda gösterilecek bilgilerin seçilmesini sağlamaktadır. Harita esaslı görüntü penceresinde görülen, elde mevcut bir kapasitenin üzerine uygulanacak bir sağ tıklama, o ünite için kullanılabilecek komut ve bilgilerin listesini operatöre sağlamaktadır. Basit açılan menü özelliği sayesinde kullanıcılar, birçok menü sayfasında gezinmek zorunda kalmadan, faydalanabileceği bütün unsur fonksiyonlarına erişebilmektedir.
Belirli bir kamerayı kontrol etmek için operatörün ekran üzerindeki simgesine dokunması yeterlidir. Kamera simgesine tıklandığında açılan pencere vasıtasıyla operatör, Pan-Tilt-Zoom ve resim hızı gibi kameranın çeşitli özellik ve fonksiyonlarını kontrol edebilir hale gelmektedir. Fare ve üzerinde bulunan kaydırma tekerleği kullanılarak, görünen alan üzerinde oynanabilmekte ve görüntüye, merkeze alma, kaydırma, büyültme/küçültme fonksiyonları uygulanabilmektedir. OSI bunun yanı sıra operatörün, ilgi sahasındaki bütün unsurları ayrıntılı olarak görebilmesini sağlayan, hedef esaslı, süratli bir büyültme/küçültme (zoom) fonksiyonuna da sahiptir. Kullanıcı ekran üzerinde gösterilen semboller için kendi tercihine bağlı olarak MIL-STD-2525B, MIL-STD1787C, MIL-STD-1477C standartlarından istediğini kullanabilir ve kendi özel sembol setini oluşturabilir.
Sürü sisteminin gözlem uçuşlarında kullanılmasıyla ilgili ilk testler, NASA tarafından 2007 yılı Temmuz ayında Wallops Island’da bulunan test merkezinde yapılmıştır. İki adet AAI Aerosonde Mk 4.1 modeli insansız hava aracı (Şekil 2) havadan gözlem görevinde kullanılmıştır. Yüksek çözünürlüklü sabit görüntüler almak maksadıyla, insansız hava araçları üzerine Canon PowerShot 580 modeli renkli kameralar yerleştirilmiştir.

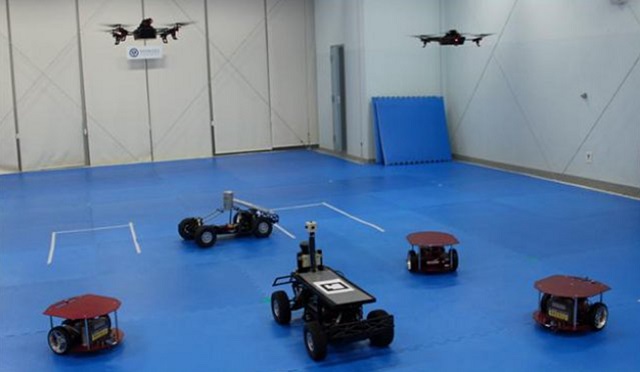
Yapılan testlerde, modifiye edilmiş dört adet Pioneer 3-AT robotu (Şekil 3) kara aracı olarak kullanılmıştır. Bu robotlar, saatte 3 km hızla, 30 kg faydalı yük taşıma kapasitesine sahiptir ve 3-6 saat boyunca görev yapabilmektedirler. Testler esnasında kullanılan 3-AT modeli insansız kara araçları üzerine, 8 adet akustik yakınlık sensörü, GPS (Global Positioning System- Küresel Konumlama Sistemi), sayısal pusula, video kamera ve simüle edilmiş hedef doğrulama sensörü yerleştirilmiştir.
Testlerde kullanılan insansız hava ve kara araçları üzerine, 1.4 GHz düşük voltaj ile çalışan, Augusta Systems SensorPort faydalı yük bilgisayarı ve 1 GB kapasiteli flaş belleğe yüklenmiş Windows XP işletim sisteminde çalışan Pentium-M işlemci modülü yerleştirilmiştir.
1.5 Mbps (6 Mbps açılma hızlı) kapasiteli geçici örgüsel ağ sağlayan, MeshNetworks WMC6300 modeli 2.4 Ghz’lik bir sim kartı, kara istasyonları görüntü verileri ve komuta kontrol iletişimlerini desteklemek için kullanılmıştır. MeshNetwork dizüstü bilgisayarı, faydalı yüklerin kontrolü maksadıyla araçların izlenmesi ve acil durumlarda elle kontrol edilebilmeleri maksadıyla kullanılmıştır. İkinci bir dizüstü bilgisayar da Operatör Sistem Arayüzü olarak kullanılmıştır.
Augusta Systems, sürü algoritmalarını, kameralar, MeshNetwork iletişim ağı, oto pilot, robot mikro kontrol ünitesi, GPS ve faydalı yük kontrol istasyonu dahil diğer sistem bileşenlerine entegre için gerekli olan yazılımı geliştirmiştir. NewVectors firması, faydalı yük bilgisayarı üzerinde çalışan sürü algoritmaları ve feromonlar ile faydalı yük kontrol istasyonundaki sürü algoritmalarının statülerinin görselleştirilmesini sağlayan yazılımı geliştirmiştir
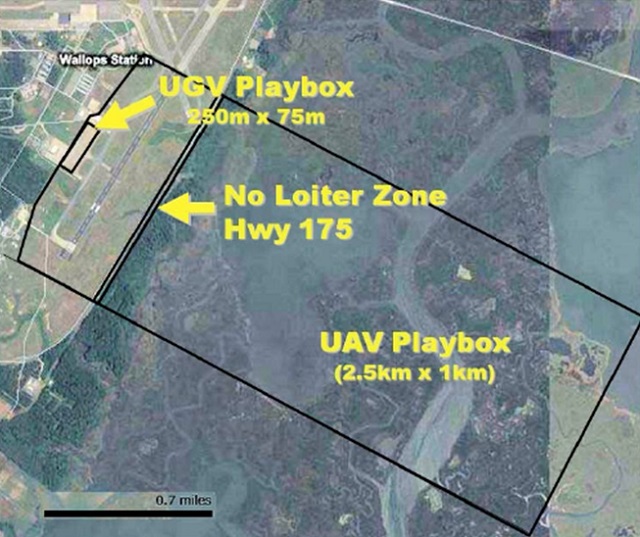
Şekil 4’de görüldüğü gibi; testler esnasında iki adet Aerosonde insansız hava aracına 2.5 X 1 km ebatlarında bir alanın gözlenmesi sorumluluğu, insansız kara araçlarına ise bu alanın daha küçük olan 250 X 75 metrelik kısmını gözleme sorumluluğu verilmiştir. İnsansız kara araçları sorumluluk alanına dört adet, bu alanın hemen dışına da insansız hava araçlarının sorumluluk alanında kalmak üzere iki adet hedef yerleştirilmiştir.
Hem insansız hava araçlarına hem de kara araçlarına, yukarıda anlatılan sürü algoritmaları uygulanmıştır. İnsansız hava araçları, sorumluluk alanlarında bir dost unsur belirlediklerinde bu unsur bir kutucukla işaretlenmiş ve görüntü Operatör Sistem Arayüzüne gönderilmiştir. İHA’lar sorumluluk sahalarında bilinmeyen bir hedef tespit ettiklerinde ise hedefin tespit edildiği yerde bir ‘‘Sensör İstek’’ mesajı (feromonu) oluşturmuşlardır. Bu mesaj, üzerlerinde hedef tanımlama sensörü (hedeflere yerleştirilen RF göndermeç sinyallerini algılayan RF almacı) olan insansız kara araçlarını harekete geçirmiştir. İnsansız kara araçlarının RF sinyalini algılayabilmeleri için hedefe olan mesafelerinin 6-8 feet arasında olması gerekmektedir.

İnsansız kara aracı hedefi tanımladığında, bu durumu OSI ve hedef üzerine çarpan diğer sensör darbelerinin dikkate alınmaması maksadıyla, sürünün kalanına rapor etmiştir. İnsansız hava aracı, yerde tespit edilen hedefin yerini, GPS ve İHA aviyonik sistem hataları nedeniyle 50 metre doğrulukla gösterebilmektedir. Sensör İstek mesajı yayılacağından ve insansız kara araçları, İHA’lar tarafından belirlenen yer etrafında araştırma yapacaklarından, İHA’ların hedefin gerçek yerini, pozisyon hatasına rağmen belirlemeleri mümkündür.
Testin başlangıcında, altı adet insansız hava ve kara aracı başarıyla teste dâhil edilmiş, fakat insansız hava araçlarından bir tanesi ile faydalı yük iletişim sistemi arıza yapmıştır. Hiçbir insan müdahalesi olmaksızın ikinci İHA, otomatik olarak duruma ayak uydurmuş ve kayıp olan İHA’nın sorumluluk sahasını da araştırmıştır. Bununla birlikte, kapsanması gereken sorumluluk sahasının elde kalan tek İHA ile kapsanması ve insansız kara araçları sorumluluk sahası kenarından 200 metre uzakta kalınması yönündeki NASA sınırlaması nedeniyle İHA, insansız kara araçları sorumluluk sahası içindeki hedefleri görmemiştir.
İHA’lardan beklenen yardım gelmemesine rağmen, insansız kara araçlarının normal sürü aktiviteleri, onları hedefi tanımlama mesafesi olan 6-8 feete getirmiş ve 200.000 metre karelik alandaki dört adet hedeften üç adedini tanımlamalarını sağlamıştır. Son olarak, demo öncesinde, insansız kara araçları üzerinde yer alan akustik çarpışma tespit sensörleri, hatalı çarpışma sinyalleri üretmeye başlamışlardır. Sensörler bu nedenle devre dışı bırakılmış ve test esnasında sürü algoritmasının çarpışmayı engelleme fonksiyonu, robotların çarpışmamasında bütün sorumluluğu üzerine almıştır. Bu durum, donanım hatalarına rağmen sürü algoritmasının etkinliğinin güzel bir kanıtı olmuştur.
Sonraki yıl ikinci bir test ve demo, kara sensörleri, insan devriyeler ile sabit kara ve hava PTZ kameraları ilave edilerek, fakat insansız hava araçları olmaksızın yeniden yapılmıştır. Yapılan testin maksadı, kullanılan çeşitli sensörlerin çevre korumasındaki etkinliğinin denenmesidir. Oluşturulan senaryoya göre bir hava alanının, gözetimsiz sensör sistemleri, insansız araçlar ve gelişmiş bir network altyapısından oluşan, dağıtık, akıllı ve geniş ölçüde otonom bir sistem tarafından düşman unsurların izinsiz girişlerine karşı korunması planlanmıştır. Sistemin, devriye ve hava alanının çevre duvarı içinde kalan bölgesini izlemekle görevli, sınırlı sayıdaki personel yetersizliğini telafi etmesi öngörülmüştür.
Çevre Koruma Test Donanımı
Pioneer 3 kara robotları, yeni motorlar ile modifiye edilmiş ve üzerlerine, küçük bir dizüstü bilgisayarı formundaki Asus EeePC üzerinde çalışan bir kontrol yazılımı eklenmiştir. Yeni motorlar ve kontrol yazılımı sayesinde kara araçlarının hızı saatte 3 kilometreden 29 kilometreye çıkarılmıştır. İnsansız kara araçları üzerine Şekil 5’de görülen Axis 213 veya 215 PTZ modeli kameralardan bir tanesi yerleştirilmiştir. Augusta System tarafından geliştirilen EdgeFrontier iletişim yazılımını ve sürü kontrol mantığını üzerinde barındıran bir SensorPort bilgisayarı araçlar üzerine yerleştirilmiştir. İlk testte de kullanılan aynı 2.4 GHz MeshNetwork iletişim sistemi, sürü üyelerinin birbirleri ve ana istasyon arasındaki iletişimi sağlamak maksadıyla kullanılmıştır. Demoda iki adet robot kullanılmıştır.

Üzerinde 213 PTZ model kamera taşıyan yere bağlı bir balonun da demo esnasında kullanılması planlanmış, fakat test esnasında meydana gelen bir kaza nedeniyle kamera kullanılamaz hale geldiğinden test kapsamından çıkarılmıştır.
Yere bağlı iki adet sabit PTZ kameranın, testler ve demo esnasında kullanıcıya ilave gözlem kabiliyeti kazandırdığı görülmüştür. Sabit PTZ kameralardan bir tanesi, Şekil 5’te görülen AXIS 232D modeli, renkli JPEG ve MPEG-4 video çıkışları olan ve IP network vasıtasıyla tam PTZ kontrolü olan kameradır. Üzerinde 18X büyütmeli optik zoom ve otomatik fokus lensleri bulunmaktadır. Sürekli 360 derece yatay hareket ve 90 derece eğim özelliklerine sahiptir. İkinci sabit PTZ kamerası, Pelcro Spectra III modeli bir kameradır. 16X büyütmeli optik zoom, otomatik fokus özellikli lensler ve 360 derece yatay, 90 derece eğim özelliklerine sahiptir. Statü ve komutlar, bir RS-422 linki vasıtasıyla iletilmekte ve video görüntüleri koaksiyel bir kablo üzerinden, görüntü aktarıcı ve görüntüleri Sensor Port istasyonuna aktaran IP network girişi olarak hizmet gören, Şekil 6’da görülen Axis 241 modeli video sunucusuna iletilmektedir.
Crane MicroObserver modeli yer sensör networkü (Şekil 7) kullanılmıştır. 20 adet MicroObserver 1045 modeli akustik ve sismik sensörü, kablosuz olarak MicroObserver girişine bağlanmıştır. Bu da IP network üzerinden SensorPort kontrol bilgisayarı ile iletişim kurmuştur. Her biri güvenilir 6 metre tespit menziline sahip olduklarından, yer sensörleri birbirlerinden yaklaşık olarak 12 metre aralıklarla yerleştirilmiştir. Sistem, birçok sensörden alınan izleri oluşturabilme kabiliyetindedir, fakat bu, daha yoğun sensör node kullanımını gerektirmekte ve birden fazla saldırgan olduğunda karışıklıklara neden olabilmektedir. Bunun yerine sürü algoritması, hedefleri izleyebilmek maksadıyla sadece bireysel sensörlerden gelen sinyaller ve PTZ kameralara dayanmak durumunda kalmıştır.

Son olarak da bir dizüstü bilgisayar ile ana istasyona kablosuz olarak bağlanan Garmin GPS izleme cihazları ile donatılmış insan devriyeleri sisteme entegre edilmişlerdir. Sürü kontrol sistemine dahil olmasalar da insan devriyeler sürü mantığına entegre edilmişlerdir. Devriyenin rapor edilen konumu, feromon haritalarda devriyelerin konumlarını gösteren ‘‘Araç Rota’’ mesajları üreten otonom sürü sistemlerine yayımlanmıştır. Yayın çapı, diğer sensörlerin mükerrer faaliyetlerini önlemek maksadıyla, insan devriyeler tarafından görülebilen alanı tahmin etmektedir. Bu şekilde sürü, mevcut insan devriyeler ile otonom gözlem görevlerini kolaylıkla koordine edebilmektedir.

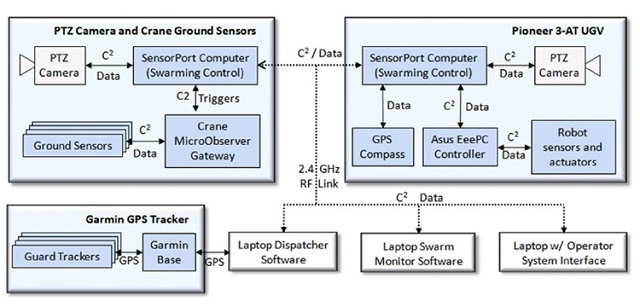
İnsansız kara araçları, PTZ kameralar ve yer sensör girişlerinin her biri, iletişim ve sürü kontrol yazılımını işleten SensorPort bilgisayarlarına irtibatlanmıştır. Şekil 8, sistem mimarisini ve alt bileşenler arasındaki iletişim bağlantılarını göstermektedir.
Saldırgan sayısı, bunların yaklaşma istikametleri ve taktikleri değiştirilerek sayısız test senaryoları oluşturulmuştur. Her bir senaryonun hedefi; sistemin saldırganları tespit ve etkisiz hale getirilene kadar yeterli bir süre etkin bir şekilde izlediğini göstermektir.
Farklı kaynakların kullanıldığı test ortamları Şekil 8’de gösterilmektedir. Tek bir sıra halinde dizilmiş yer sensörleri, dikdörtgen şeklindeki ebatları 80 X 150 metre olan alanın kuzey ve batı kenarları boyunca yerleştirilmiştir. İki adet PTZ kamerası, alanın güney kenarına yerleştirilmiş ve kara robotları sarı ile gösterilen gölgeli alanda dolaşmaktadırlar.
Bu demoda, otomatik hedef tanımlama fonksiyonu kısmen simüle edilmiştir. Her bir saldırgan, sürekli olarak konumunu PTZ kameralara gönderen bir GPS izleme ünitesi ile donatılmış, fakat iş birliğine dayalı kontrol yazılımı hariç bırakılmıştır. Saldırganlar, yer sensörlerinden gelen mesajlar veya GPS koordinatları PTZ kameralarının görüntüleri ile eşleştiğinde, PTZ kameralar tarafından tespit edilmektedirler.
Bir saldırgan tespit edildiğinde bir ‘‘Sensör İstek’’ mesajı yer sensörü veya PTZ kamera tarafından gönderilmektedir. Sürü algoritması, PTZ kameralardan bir tanesini saldırganı izlemeye yönlendirdiğinde, kamera, GPS koordinatlarını kullanarak yatay hareket alanında saldırganı izlemeye başlamaktadır. Saldırgan, müdahale maksatlı gönderilen bir koruma görevlisi daha önceden belirlenmiş bir mesafe kadar hedefe yaklaştığında veya saldırgan, yine önceden belirlenmiş bir zaman diliminde sürekli olarak izlendiğinde etkisiz hale getirilmiş olarak kabul edilmektedir.
Kameraların, görüş alanından çıktığında, izlenmekte olan hedefin görüntüsünü kaybetmeleri olasılık dâhilindedir. Böyle durumlarda sürü algoritmaları devreye girerek başka bir kameranın hedefe kilitlenmesini ve izleme faaliyetinin, hedef etkisiz hale getirilene kadar devam etmesini sağlamaktadır. Bu işlem bazı demo testlerinde gözlenmiştir.
Saldırganlar, korunan alana sadece çiti aşarak girebileceklerinden, belirsizlik mesajları çitte oluşturulur ve yaklaşık olarak yaya yürüyüş hızında, korunan alan içine yayımlanır. Korunan alan tarandığında, belirsizlik mesajı derhal sensörün görüş alanından temizlenir. Bununla birlikte yeni bir Belirsizlik Mesajı, derhal komşu bölgelerden bu bölgeye, daha önce araştırılan alana yönelen sensörün menzili dışındaki olası saldırganları gösteren yeni Belirsizlik Mesajları yayımlamaya başlar. Böylece Belirsizlik Mesajı, sensör tarama alanı geçmişine dayanarak, potansiyel saldırganların nerede saklandıklarını göstermeye devam etmektedir.
Enerji tasarrufu, sürekli gözlem ve devriye görevlerinde kritik bir öneme sahiptir. Networkte bulunan bütün unsurlar enerji kullanımını en aza indirgeyecek şekilde tasarlanmışlardır. Yer sensörlerinden, sadece akustik sensörler devamlı açık durumdadırlar. Akustik bir sensör tetiklendiğinde, sismik sensör saldırganı sınıflandırmak ve akustik hatalı alarmları elimine etmek için aktif hale gelir. İnsansız kara araçlarının enerji kullanımının minimuma indirgenmesi maksadıyla sürü algoritmaları kullanılarak, birçok saldırganın izlenmesi gibi, ihtiyaç duyulduğu ana kadar insansız kara araçlarının sabit bir şekilde beklemeleri sağlanmıştır.
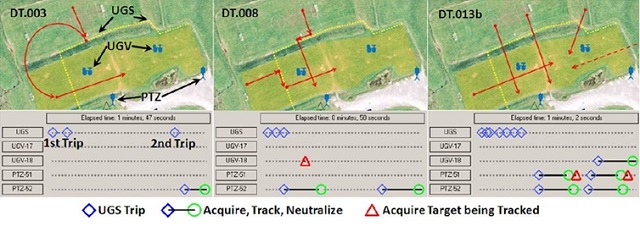
Sonuçları görmek maksadıyla on sekiz ayrı test uygulanmıştır. Her bir testte, korunan alana farklı yönlerden ve değişik taktikler kullanarak giren, sürü algoritmasını karıştırma ve devre dışı bırakmayı hedefleyen bir ile beş arasında saldırgan kullanılmıştır. Şekil 9, bazı testleri, sensör tetikleme zaman çizelgesini ve izleme faaliyetlerini göstermektedir. Yapılan testler esnasında, bir insansız kara aracını tetikleme ve sonra geri çekilerek başka bir yönden giriş (DT.003), yer belirleme girişimlerini engelleme maksadıyla insansız kara aracı sorumluluk alanı boyunca yürüme (DT.008), giriş ve çıkış, iki saldırganın aynı anda girişi ve sonra farklı yönlere gidişi dahil olmak üzere farklı sızma stratejileri uygulanmıştır. Testlerden iki tanesinde, çite beş farklı yönden giren toplam beş saldırgan kullanılmıştır, testlerden birinde insansız kara araçları alanı tamamen baypas edilmiştir. Bu senaryoda beş saldırganın tamamı tespit edilmiş, izlenmiş ve insansız kara aracının ilk giriş yapanı tespit ettiği zamanına göre bir dakika içinde etkisiz hale getirilmişlerdir.
Tablo 1’de bütün test sonuçları özetlenmiştir. Tabloda, saldırganların hangi yönden çite girdikleri gösterilmektedir. Üç farklı etkisiz hale getirme yöntemi kullanılmıştır. İlk yöntem bir muhafız gelene kadar bir kamera ile saldırganın izlenmesidir. Diğer iki yöntemde, hedefin etkisiz hale getirilmesi, bir kamera ile 30 saniye (T30) veya 15 saniye (T15) izlenmesini gerektirmektedir. İlk saldırgan girişinin tespitinden, sonuncusunun etkisiz hale getirilmesine kadar geçen toplam süre tabloda listelenmiştir. DT.001 ve DT.003 birbirlerinin aynısı senaryolardır fakat DT.001 senaryosunda insansız kara araçları bulunmamaktadır.
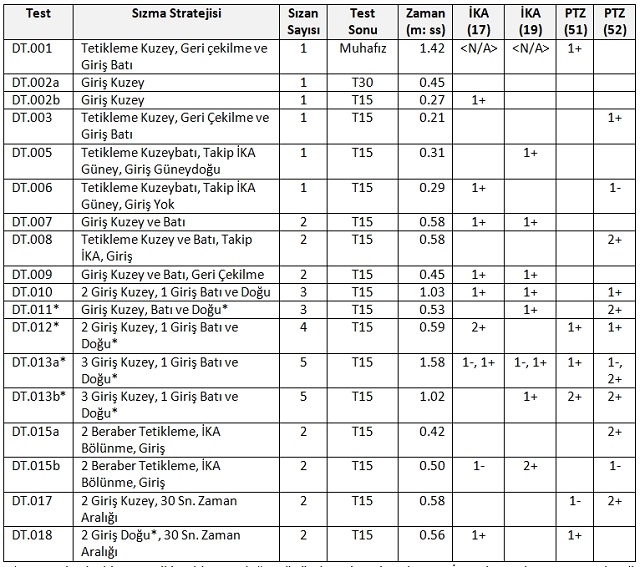
Diğer benzer testler ‘‘a’’ ve ‘‘b’’ şeklinde işaretlenmiştir. “*” ile işaretlenen senaryolarda en az bir saldırgan çite doğudan girmekte ve insansız kara araçlarının sorumluluk alanını tamamen baypas etmektedir. Bu hedef, dört kameranın bir tanesi tarafından, normal gözlem faaliyeti sonucu tespit edilmektedir. Her bir insansız kara aracı veya PTZ kamera tarafından tespit edilen saldırgan sayıları da tabloda listelenmiştir. “n+” sensörün, etkisiz hale getirilene kadar başarıyla izlediği hedef sayısını, “n-“ ise sensörün izlemeye başladığı ve diğer bir sensör tarafından bulunana kadar kaybettiği hedef sayısını göstermektedir.*Bu testlerde bir veya iki saldırgan doğu yönünden çite girmekte ve İKA alanını baypas etmektedir. *DT.001 ve DT.003 zamanları saldırganların ikinci girişlerinden alınmadır.
Genel olarak sistem operasyonel testler esnasında uygun çalışmış, bütün saldırganların tespit, izlenme ve etkisiz hale getirilmesi, insanların asgari seviyede müdahalesi ile iki dakika içinde tamamlanmıştır. Mevcut izleme kamera sayısından bir veya daha fazla saldırganın olduğu senaryolarda sürü algoritması başarılı bir şekilde devreye girerek beş saldırganın tespit ve etkisiz hale getirilene kadar izlenmesi maksadıyla görevleri diğer kameralara aktarmıştır. Sürü algoritması, bütün sızma teşebbüslerinin engellenmesindeki verim ve etkinliğini, sensörlerin koordinasyonunda ispatlamıştır.
Sivil ve askeri gözlem görevleri ile kritik tesis korumasında hava ve kara sürü sistemlerinin birlikte kullanımı, NAVAIR ve Augusta Systems firmasının ana yüklenici oldukları bir çalışma ve sonunda uygulanan testler ile gösterilmiştir.
İnsansız hava ve kara sistemlerinin diğer sensör, kamera ve insan devriye unsurları ile birlikte kullanılması, özellikle kritik tesislerin korunma derecelerini artırmakta ve insana olan bağımlılığı azaltarak kritik tesislerin güvenliğine büyük avantajlar sağlamaktadır.
[1] Parunak, H.V.D., Go to the Ant: Engineering Principles from Natural Agent Systems. Annals of Operations Research, 1997. 75: p. 69-101.
[2] Harbour, J.L., Bauer, S.G., Bruemmer, D.J., Carroll, D.M., Pacis, E.B., Mullens, K.D., and Everet, H.R., Enabling Technologies for Unmanned Protection Systems, in SPIE Proc. 5804: Unmanned Ground Vehicle Technology VII. 2005: Orlando, FL, www.inl.gov/adaptiverobotics/dynamicautonomy/pubs/ spie_2005_5804-66_carroll.pdf
[3] Carroll, D.M., Mikell, K., and Denewiler, T., Unmanned Ground Vehicles for Integrated Force Protection, in SPIE Proc. 5804: Unmanned Ground Vehicle Technology VII. 2005: Orlando, FL, www.nosc.mil/robots/pubs/spie5422-50.pdf
[4] Gray, R., Integrated Swarming Operations for Air Base Defense: Applications in Irregular Warfare. 2006, Naval Postgraduate School: Monterey, CA. p. 91, http://handle.dtic.mil/100.2/ADA451371
[5] Dasgupta, P. Distributed Automatic Target Recognition Using Multiagent UAV Swarms. in Fifth International Joint Conference on Autonomous Agents and Multiagent Systems. 2006. Hakodate, Japan
[6] Gaudiano, P., Shargel, B., Bonabeau, E., and Clough, B.T. Swarm Intelligence: a New C2 Paradigm with an Application to Control of Swarms of UAVs. in 8th ICCRTS Command and Control Research and Technology Symposium. 2003. Washington, DC
[7] Payton, D., Daily, M., Estowski, R., Howard, M., and Lee, C., Pheromone Robotics. Journal Autonomous Robots, 2001. 11(3): p. 319-324.
[8] Sauter, J.A., Matthews, R., Parunak, H.V.D., and Brueckner, S.A. Performance of Digital Pheromones for Swarming Vehicle Control. in Fourth International Joint Conference on Autonomous Agents and MultiAgent Systems. 2005. Utrecht, Netherlands: ACM, www.newvectors.net/staff/parunakv/AAMAS05Swarm ingDemo.pdf
[9] Parunak, H.V.D., Purcell, M., and O’Connell, R., Digital Pheromones for Autonomous Coordination of Swarming UAV’s, in First AIAA Unmanned Aerospace Vehicles, Systems, Technologies, and Operations Conference. 2002, AIAA: Norfolk, VA, www.newvectors.net/staff/parunakv/AIAA02.pdf
[10] Payton, D., Daily, M., Estowski, R., Howard, M., and Lee, C., Pheromone Robotics. Journal Autonomous Robots, 2001. 11(3): p. 319-324.
[11] Parunak, H.V.D., Brueckner, S., and Odell, J.J., Swarming Coordination of Multiple UAV’s for Collaborative Sensing, in Second AIAA “Unmanned Unlimited” Systems, Technologies, and Operations Conference. 2003, AIAA: San Diego, CA, http://www.newvectors.net/staff/parunakv/AIAA03.pdf
[12] Sauter, J.A., Matthews, R., Parunak, H.V.D., and Brueckner, S.A., Effectiveness of Digital Pheromones Controlling Swarming Vehicles in Military Scenarios. Journal of Aerospace Computing, Information, and Communication, 2007. 4(5): p. 753-769.
[13] Parunak, H.V.D. and Brueckner, S.A. Stigmergic Learning for Self-Organizing Mobile Ad-Hoc Networks (MANET’s). in Third International Joint Conference on Autonomous Agents and Multi-Agent Systems (AAMAS’04). 2004. Columbia University, NY: ACM, http://www.newvectors.net/staff/parunakv/AAMAS04 MANET.pdf
[14] Sauter, J.A., Matthews, R.S., Robinson, J.S., Moody, J., and Riddle, S. Swarming Unmanned Air and Ground Systems for Surveillance and Base Protection. in AIAA Infotech@Aerospace 2009 Conference. 2009. Seattle, Washington

Çeviren: Ercan Caner Elektrik ve Elektronik Mühendisliğinin yanı sıra, uçak ve helikopter lisanslarına sahiptir. Kara Harp Okulunu 1985 yılında tamamlayan, yüksek lisans derecesini 2012 yılında Gazi Üniversitesi’nden Avrupa Birliği – Türkiye İlişkileri alanında alan Caner, halen Türkiye Hava Sahası Yönetimi alanında Haliç Üniversitesi’nde doktora tez çalışmalarını sürdürmektedir. Bir yazılım firmasında proje yöneticisi ve havacılık projeleri alan uzmanı olarak çalışan Caner, Asliye Ceza Mahkemelerinde ‘‘Havacılık Bilirkişiliği’’ alanında pilot ve bakım uzmanlığı görevini de yürütmektedir. İleri Mühendislik ve Tasarım alanında ‘‘Mentor’’ unvanı da olan Caner, havacılık, savunma, teknoloji, güncel haber ve güncel politika hakkındaki yazı ve çevirilerini academia.edu ve sunsavunma.net sitelerinde paylaşmaktadır. Caner evli ve iki çocuk babasıdır. İngilizce bilen ve Fransızca okuyabilen Caner’in İnsansız Hava Araçları (2014) ve Taarruz Helikopterleri (2015) konulu makaleleri yayımlanmıştır. 40 yılı kapsayan Türk Silahlı Kuvvetleri, Birleşmiş Milletler, NATO ve savunma sektör deneyimlerine sahiptir. ercancaner@gmail.com






