Ankara
Hafif Yağmurlu
6°C
Ankara
6°C
Hafif Yağmurlu
Pazar
Hafif Kar Yağışlı
9°C
Pazartesi
Parçalı Bulutlu
16°C
Salı
Az Bulutlu
18°C
Çarşamba
Parçalı Bulutlu
20°C


Yazarlar: Alberto Torres Angonese, Paula Fernando Ferreira
Çeviren: Ercan Caner, Sun Savunma.Net
Bu çalışma, çok sayıda İnsansız Hava Aracı (İHA)’nın uçuş ve seyrüseferini kontrol edebilen, kol uçuşu uygulama karakteristiklerini uygulayabilen, engellerden kaçınmayı sağlayabilen bir yer istasyonu için geliştirilen hesaplama yöntemlerini ortaya koymaktadır. Sistem, görev planlama ve çoklu uçuş kontrol modülleri olmak üzere iki modül olarak tasarlanmış ve geliştirilmiştir. Görev planlama modülünde ilave olarak, kol uçuşu ve rota planlama modülleri olmak üzere iki modül daha bulunmaktadır. Bu modüller, Coğrafik Bilgi Sistemi (Geographic Information System-GIS) olarak kullanılabilmelerini sağlayan, doğrudan üç boyutlu haritalar üzerinde kol uçuşu ve rota planlamaya imkân veren, NASA tarafından hazırlanan, dünya üzerindeki herhangi bir noktanın görüntüsünün alınmasını sağlayan NASA World Wind API programına dayanmaktadır. Çoklu uçuş kontrol modülü için potansiyel alan tabanlı bir yöntem geliştirilmiştir. Bu modülde kol uçuş koordinatları, hava aracı için sanal ilgi çekici koordinatlar olarak rota planlaması maksadıyla seçilen noktalara yansıtılmaktadır. İHA’lar belirlenen noktalara yönlendirildiğinde planlanan uçuş rotası üzerindeki çoklu İHA’ların birbirlerine çarpmaları, oluşturulan ‘itme alanı’ sayesinde önlenir. Önerilen metodolojinin test edilmesi ve doğrulanması maksadıyla bir simülatör geliştirilmiştir. Bu simülatör ile, görev öncesi simüle edilmiş uçuşun görselleştirilmesi yolu ile görev planlaması yapmak ve potansiyel alan parametrelerini değerlendirmek mümkündür. Simülasyon ortamının diğer bir özelliği de Yer Kontrol İstasyonunun, X-Pi (X-Plane Interface) açık kaynak ara yüzü vasıtasıyla çoklu uçuş görevlerini gerçeğe çok yakın bir şekilde simüle edebilen X-Plane uçuş simülatörü ile entegre edilebilmesidir.
Son zamanlarda İHA’lar askeri ve sivil maksatlı olarak ve genelde insanlar için tehlikeli bir şekilde sıkça kullanılmaktadır. İHA kullanım senaryolarının birçoğunda, birbirleri ile işbirliği içerisinde hareket eden çoklu hava araçlarının kullanılması, görevin daha iyi bir şekilde icrası için gereklidir. Bunu bir örnekle açıklamak gerekirse, 2010 yılında Rio de Janeiro’nun dağlık kesimlerinde meydana gelen toprak kaymasını izleme operasyonunu kullanabiliriz. Görev, UAV-IME[1] Projesi ile yürütülmüştür. Bu doğal felakette binlerce insan toprak kayması nedeniyle toprak altında kalmıştır. Felaketin hemen sonrasında İHA’lar tarafından çekilen hava fotoğraflarının Şekil 1’de görülen Google Haritaları ile karşılaştırılması, toprak altında kalan kurbanların yerlerinin belirlenmesini ve kurtarma ekiplerinin süratle bu bölgelere yönlendirilerek arama kurtarma faaliyetlerinin hızlandırılmasını sağlamıştır. Bu senaryoda zaman, kurbanların kurtarılmaları açısından çok kritik bir faktördür. Birbirleri ile işbirliği içerisinde hareket eden çoklu hava araçlarının kullanılması zamanı kısaltacak ve hayatta kalanların kurtarılma ve yaşama şanslarını artıracaktır.
UAV-IME Projesi kapsamında yürütülen araştırmalar esnasında otonom insansız hava araçlarının MaSE (Multi-Agent Systems Engineering–Çok Ajanlı Sistem Mühendisliği) teknikleri kullanılarak yönetildiği bir modellemenin[2] yapılması ve filo unsurlarının modeller olarak haritalanması önerilmiştir. Bu çalışmada, uçuş planlama ve akıllı algoritmaların test edilmesi amacıyla, yazarlar tarafından bir otonom insansız hava araçları simülatörü[3] geliştirilmiş ve otonom hava araçları için görüntü tabanlı seyrüsefer sistemi kullanılması önerilmiştir[4].
Yapılan çalışmalarda[5],[6],[7], çoklu uçuş problemine potansiyel alan yöntemi ile yaklaşılmış ve önerilen sistemin test edilmesi ve doğrulanması için simülasyon ortamı kullanılmıştır. Vidal tarafından, 7 adet makineden oluşan ve çoklu hava araçları için yüksek performanslı bir simülasyon ortamı sağlayan X-Plane uçuş simülatörünü[8] ve Matlab/Simulink ortamını birbirine bağlayan, küme şeklinde bir yapılanma kullanılması önerilmiştir. Garcia ve Barnes tarafından kaleme alınan ‘Multi-UAV Simulator Utilizing X-Plane’ isimli çalışmada, uçuş ve kol uçuş kontrolünde, ‘Unmanned Ground Vehicle Swarm Formation Control Using Potential Fields’ konulu çalışmada ele alınan sürü araçlarının kontrolü ve potansiyel fonksiyonları esas alınmıştır. Paul, Krogstad ve Gravdahl tarafından kaleme alınan ‘Modelling of UAV Formation Flight Using 3D Potential Field’ konulu çalışmada ‘Lider’ olarak adlandırılan sanal bir lidere bağlı, ‘Takipçiler’ olarak adlandırılan birçok İHA’nın tanımlanan bir bölgeye götürülmesi ve rota boyunca uçuşlarının takip edilmesi incelenmiştir.

Bu yazıda, kol uçuşunda çoklu insansız hava araçlarını kontrol edebilen ve bir Yer Kontrol İstasyonu için geliştirilen yazılım çözümü sunulmaktadır. Meyer tarafından kaleme alınan X-Plane Operation Manual’den uyarlanan potansiyel alan esaslı yöntem, çoklu uçuş yaklaşımı için geliştirilmiştir[9]. Çoklu uçuş fonksiyonellikleri için önerilen metotların test edilmesi ve doğrulanması maksadıyla; görev planlama ve çoklu uçuş kontrol modülü olmak üzere iki modülden oluşan bir simülasyon ortamı geliştirilmiştir. Görev planlama modülü, 3B coğrafik bilgilerin manipülasyonunu ve görüntülenmesini sağlayan NASA World Wind API[10] programına dayanmaktadır. Görev planlaması sonrasında simülatör, simüle edilmiş uçuş yollarını görüntüleyerek uçuş şartlarının analiz edilmesini sağlar. Simülatörün bu özelliği, potansiyel alan parametrelerinin gözden geçirilmesini ve görev öncesi uçuş planlamasının tekrar değerlendirilmesine imkân sağlamaktadır. Yer Kontrol İstasyonunun diğer bir özelliği de X-Plane uçuş simülatörü ile entegre olabilmesidir. X-Pi olarak adlandırılan açık kaynak ara yüz vasıtasıyla sağlanan iletişim, gerçeğe çok benzeyen bir ortamda çoklu uçuş uygulamasına imkân sağlamaktadır.
Bu çalışma giriş bölümüne ilave olarak 3 kısımdan oluşmaktadır. İkinci kısımda Yer Kontrol İstasyonu modülleri detaylı olarak incelenmekte, üçüncü kısımda ise yapılan testler ve sonuçları sunulmaktadır. Son olarak dördüncü kısımda, çalışma ve bulgulara bağlı olarak gelecek için öneriler sunulmaktadır.
Yer Kontrol İstasyonu iki modülden oluşmaktadır: görev planlama ve çoklu uçuş kontrol modülleri. Görev planlama modülü NASA World Wind programına dayanmakta olup, kol uçuşu planlaması ve rota planlaması olarak iki alt modüle bölünmüştür.
World Wind, Java uygulamaları için bir komponentler dizisi sağlayarak coğrafi bilgilerin ele alınmasını ve işlenmesini sağlayan bir API (Application Programming Interface) ara yüzüdür. Bu arayüz ile 3B haritalar kullanılarak rota planlaması ve kol uçuş planlaması için grafiksel bir aracın geliştirilmesi mümkün olmuştur. Şekil 2’de sunulan akış diyagramı, görev planlama modülünün genel bir görünümüdür.
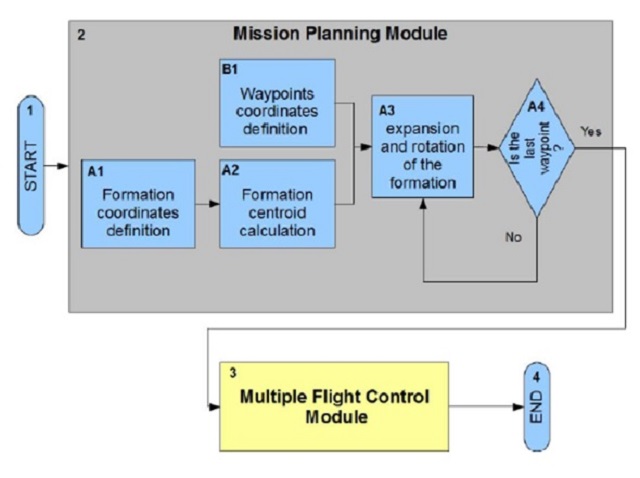
Şekil 2’de gösterilen 1. aşamada, kol uçuşu planlama modülü kullanılarak kol uçuşu koordinatları grafiksel olarak elde edilmektedir. Şekil 3, çalışmamızda delta kolu olarak adlandırılan üçgen şeklinde tertiplenmiş bir kolu göstermekte olup, haritada gösterilen sembollerin her biri simülasyon ortamında bir hava aracına karşılık gelmektedir. Görüntünün solunda yer alan panelde kol uçuşu ve rota planlama modülleri arasında, Şekil 2’de gösterilen 2’nci ve 3’ncü aşamalara karşılık gelen geçiş yapılabilmektedir. B1 aşamasında seyrüsefer (S/S) maksadıyla kullanılacak noktaların koordinatları, rota planlama aracında belirlenir. A1 aşamasında olduğu gibi uçuş planı S/S noktalarının koordinatları da, Şekil 8’de gösterildiği gibi, işaretleyicilerin harita üzerinde noktalanması suretiyle grafiksel olarak elde edilmektedir. Kolun merkez noktası, Şekil 2’de gösterildiği gibi A2 aşamasında tanımlanmaktadır. Kol merkezi, her bir hava aracının A1 aşamasında belirlenen enlem ve boylam koordinatları kullanılarak belirlenmektedir. Kolun merkezi aşağıdaki formül ile belirlenir:
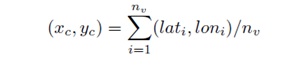
Formülde xc ve yc, kol merkezinin koordinatlarıdır. nv, toplam İHA sayısı; lati ve loni, her bir İHA’nın, görev planlama akış diyagramında gösterilen ve A1 aşamasında elde edilen enlem ve boylam koordinatlarıdır. A1 aşamasında kol oluşturulduğunda, kolun merkez noktası hesaplanır (Aşama 2), S/S noktaları B1 aşamasında tanımlanır, görev planlama modülü rota üzerindeki her bir S/S noktasının koordinatlarını büyütür ve döndürür (Akış Diyagramı A3 ve A4 aşamaları). Bu işlem aşağıdaki formül ile yapılır:
Wix = Wactualx + (dxc cos(θ) + dyc sin(θ))
Wiy = Wactualy + (−dxc sin(θ) + dyc cos(θ))
Formülde, Akış Diyagramı A1 aşamasında elde edilen dxc kolun merkez noktasından olan enlemsel mesafeyi, dyc ise yine kolun merkez noktasından olan boylamsal mesafeyi göstermektedir. θ, kullanılmakta olan/geçerli S/S noktası (Wactual) ile bir sonraki S/S noktası (Wprox) arasındaki açıdır. (Wix, Wiy), koldaki her bir İHA için tanımlanan ve bir sonraki S/S noktasına bağlı olarak büyütülen ve döndürülen S/S noktalarının koordinatlarına karşılık gelmektedir.

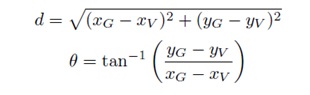
Akış diyagramında gösterilen potansiyel ilgi alanını hesaplamak maksadıyla (Aşama C1), [xG, yG]’nin hedefin koordinatlarını gösterdiğini varsayalım, r de hedefin yarıçapıdır. [xV, yV] koordinatları İHA’nın konumunu göstermektedir; s etki alanı, α ise çekim kuvvetidir. Bu parametrelerle İHA ile S/S noktası arasındaki d mesafesi ve θ baş istikameti hesaplanır:
Sonrasında, ∇xG ve ∇yG hesaplamalarında aşağıdaki kurallar uygulanır:
1) If d < r then ∇xG = ∇yG = 0
2) If d > r + s then ∇xG = αs cos(θ) and ∇yG = αs sin(θ)
3) If r ≤ d ≤ r + s then ∇xG = βr cos(θ) and ∇yG = βr sin(θ)
Potansiyel İtme Alanı Hesabı
C2 aşamasında, [xO, yO]’nun engel[i] koordinatlarını, [xV, yV]’nin ise İHA konumunu gösterdiği, itme alanı hesaplaması yapılmaktadır. R engel yarıçapı, S itme etki alanı, β ise itme kuvvetidir. C1 aşamasında olduğu gibi d ve θ, engel koordinatları kullanılarak hesaplanır. ∇xO ve ∇yO’nun hesaplanmasında aşağıdaki kurallar uygulanır:
1) If d < r then ∇xO = −βs cos(θ) ve ∇yO = −βs sin(θ)
2) If r ≤ d ≤ r + s then ∇xO = −β(R + S − d) cos(θ) and ∇yO = −β(R + S − d) sin(θ)
3) If d > r + s then ∇xO = ∇yO = 0
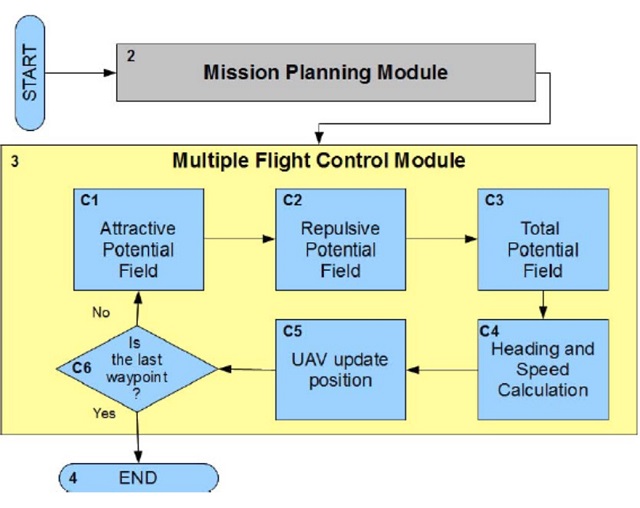
∇xG ve ∇yG C1 aşamasında potansiyel çekim alanı, ∇xO ve ∇yO ise C2 aşamasındaki itme alanından oluşturulur. Toplam potansiyel alanı hesaplamak üzere C3 aşamasında birleştirilirler:
∇xtotal = ∇xO + ∇xG
∇ytotal = ∇yO + ∇yG
Akış Diyagramı C4 aşamasında v hızı ve θ baş istikameti aşağıdaki gibi hesaplanır:
v2 = ∇x2 + ∇y2
θ = tan−1(∇y/∇x)
C5 aşamasında her bir hava aracının eylem ve boyla bilgisi güncellenir ve sonrasında her hava aracının bulunduğu konumdan bir sonraki gitmesi gereken, kendisine ait S/S noktasına olan mesafe ve baş istikameti hesaplanır. C6 aşamasında, geçerli olan S/S Wactual noktasının son S/S noktası olup olmadığına bakılır. Son S/S noktası değil ise C1-C5 aşamaları son S/S noktasına kadar yeniden hesaplanarak görev tamamlanır.
Bu kısımda Yer Kontrol İstasyonunun kullanılması, çoklu hava aracı kol uçuşu simüle edilerek anlatılacak ve çoklu uçuş kontrol modülünde uygulanan potansiyel alan algoritmalarının doğrulanması gösterilecektir. S/S noktasının koordinatları ve hava aracının konumu başlangıç olarak, Kartezyen koordinat düzleminde merkez noktası (x, y) = (0,0) olarak gösterilecektir.
Test I
Şekil 5’de, delta kol uçuşundaki hava araçlarının simüle edilen rotaları gösterilmiştir. Hava araçlarının başlangıç koordinatları, delta (üçgen) konumunu oluşturmak için, 1. İHA için (0,0), 2. İHA için (-1,-1) ve 3. İHA için (1,-1) olarak belirlenmiştir.
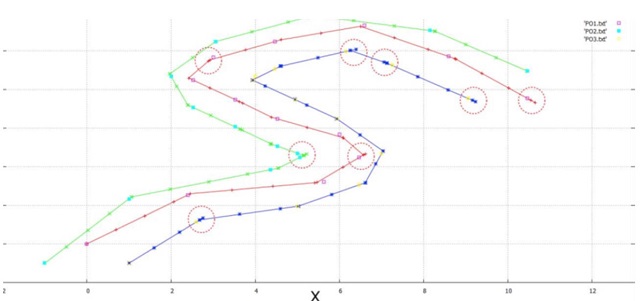
Şekil 5: Delta Kol Uçuşu Simülasyonu: kırmızı, yeşil ve mavi renkli rotalar ile gösterilen 1-2-3 numaralı İHA’lar; pembe, yeşil ve sarı renkteki karelerle gösterilen PO1, PO2 ve PO3 numaralı S/S noktalarına yönlendirilmişlerdir. Rota üzerindeki daireler, İHA’ların istenmeyen davranışlarını göstermektedir.
Sabit kanatlı bir hava aracının uçuş karakteristik ve dinamikleri göz önüne alındığında, Test I bazı imkânsız hava aracı manevralarının olduğunu göstermiştir. Tespit edilen ilk problem, İHA düz uçuşta bir sonraki S/S noktasına ileri doğru giderken noktayı geçmesi ve sonrasında o noktayı tanımlamak için geri uçuşunda yaşanmıştır. Diğer problem İHA’lardan birinin S/S noktasına ulaştığında diğer İHA’ların kendileri için planlanmış olan noktalara gelmesini beklemek için durması ve sadece diğerleri geldiğinde ileri hareketine devam etmesinde yaşanmıştır. İHA’ların bu davranışları, Şekil 5’te rotalar üzerindeki daireler ile gösterilmiştir. Bu problemlerin çözümü her İHA’nın kendi S/S noktasına ulaşabilmesi için gerekli orantısal hız metodunu kullanması ile sağlanmıştır. Bu yöntemde her İHA kendi S/S noktasını tespit ettiğinde diğer İHA’ları beklemeden diğer S/S noktasına doğru hareketine devam etmektedir. Her bir çekim alanının s parametresi simülasyon esnasında, her bir İHA’yı kontrol eden maksimum, medium ve minimum smax, smed ve smin değerleri alınarak dinamik olarak değiştirilmek zorundadır. Hız kontrol metodu hava araçlarının birbirlerine olan göreceli mesafeleri ve her bir hava aracının son S/S noktasına olan mesafesine bağlıdır ve aşağıda belirtilen aşamaları kapsar:
Mesafe limitten düşük ise s, smax olarak S/S noktasından en uzakta olan İHA’ya hızını artırmak üzere bağlanması, S/S noktasına yakın olan İHA’ya hızını düşürmek maksadıyla smin olarak bağlanması işlemidir. İHA’lar başlangıçta oluşturulan mesafe limitleri içerisinde ise hepsine smed hızları bağlanarak seyahat süratlerini muhafaza etmeleri sağlanır.
Test II
Şekil 6 ve Şekil 7’de sunulan simülasyonlarda orantılı hız metodu kullanımının delta kol uçuşunun rota boyunca muhafaza edilmesindeki başarısı karşılaştırmalı olarak incelenmiştir.
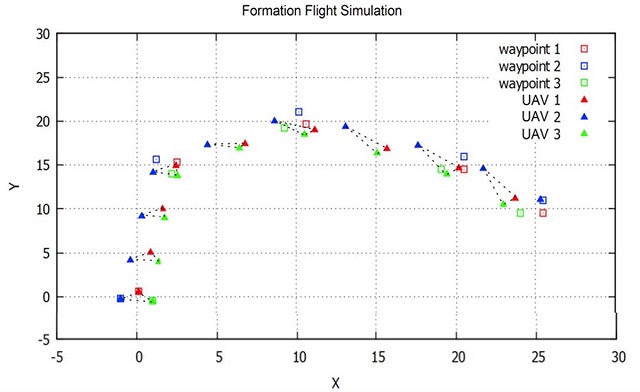
Şekil 6: Orantılı Hız Olmaksızın Delta Kol Uçuşu
Şekil 6’da sunulan grafikte uçuş simülasyonu orantılı hız metodu olmadan gösterilmektedir ve uçuş rotası boyunca özellikle ileri aşamalarda kol uçuşunun bozulduğu açıkça görülmektedir.
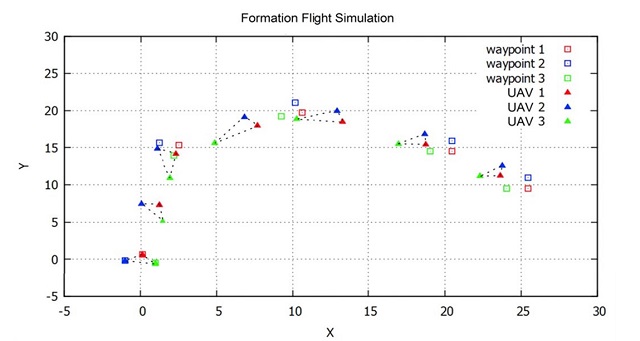
Şekil 7: Orantılı Hız ile Delta Kol Uçuşu
Şekil 7’de gösterilen orantılı hız metodunda ise kol uçuşunun keskin dönüşlerde bozulduğu, fakat dönüşün hemen sonrasında tekrar uygun hale geldiği görülebilir.
Test III
Şekil 8, 9 ve 10‘da Yer Kontrol İstasyonunda 2 adet hava aracı için belirlenen bir rota için yapılan görev planlamasından seyrüsefer kontrolüne kadarki uygulamalar gösterilmektedir. Bu simülasyon uçuşunda kullanılan hava aracı modeli Cessna Skyhawk’tır ve X-Plane simülatöründe modellenmiştir.

Şekil 8: Görev Planlama Modülü: uçuş rotasının tanımlanması
Bütün çalışmalarda, 2D yaklaşma metotlarını kolaylaştırmak maksadıyla sabit 2000 feet irtifa kullanılmıştır. Şekil 8’de rota planlama aracı gösterilmekte, Şekil 9’da ise X-Plane simülatörde planlanan uçuş yörüngesi gösterilmektedir. Şekil 10’da X-Plane simülasyon ortamında harita üzerinde simüle edilen uçuş rotası gösterilmektedir. Şekil 8 ve 9’da gösterilen ve Şekil 10’de harita üzerine aktarılan uçuş rotalarının aynı olduğu görülebilir.
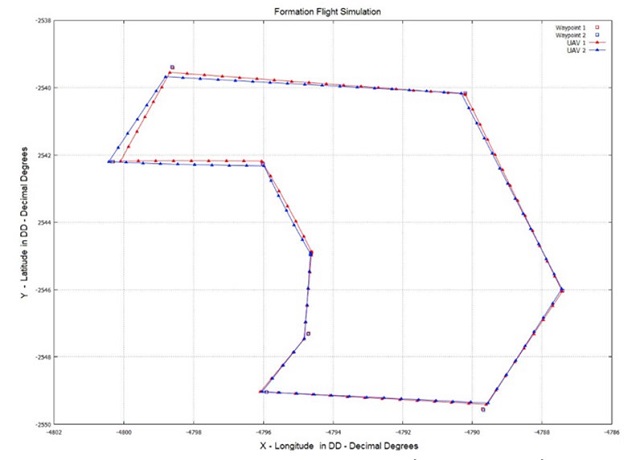
Şekil 9: Simülasyon öncesinde üretilen grafik: İHA 1 Kırmızı, İHA 2 Mavi
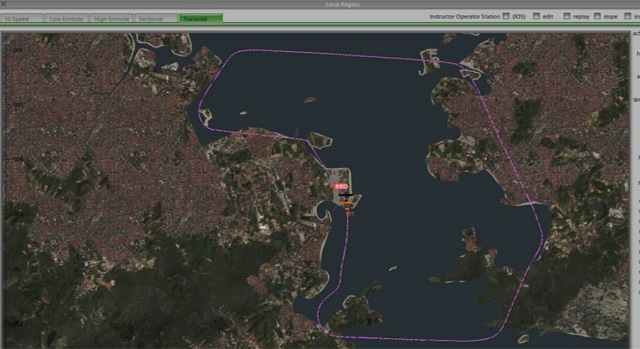
Şekil 10: X-Plane uçuş simülatöründe uçuşun harita üzerinde gösterilmesi: İHA 1 Turuncu, İHA 2 Siyah. İHA’lar sırasıyla 102 ve 104 numaraları ile gösterilmektedir
Bu çalışmada, çoklu insansız hava araçlarını kontrol edebilme kabiliyeti olan bir yer kontrol istasyonu için geliştirilen yazılım sunulmuştur. X-Plane simülatöründe, çoklu uçuş kontrolü için önerilen çözümlerin testlerinin yapıldığı ve doğrulandığı bir simülasyon ortamı oluşturulmuştur. X-Plane simülatörünün entegrasyonu yoluyla yer kontrol istasyonun çoklu insansız hava araçlarının kontrolündeki tam etkinliği gerçeğe benzer ortamlarda gösterilmiştir.
Bu çalışmada sunulan yer kontrol istasyonu yazılım çözümünün uygulanabilir ve tam fonksiyonel olduğu ispatlanmıştır. Ancak, bu çalışmanın bir başlangıç aşaması olduğu ve daha birçok geliştirmelerin yapılabileceği de açıktır. Örnek olarak, hava araçlarının farklı görevleri yerine getirebileceği akıllı bir seyrüsefer kontrol fonksiyonu ilave edilebilir. Diğer bir gelişme ise, yer kontrol istasyonunun merkezi bir kontrol ünitesi olmaktan ve yerde tek bir kontrol istasyonu olarak kullanılması yerine, hava araçları üzerine yerleştirilerek kullanılmasıdır. Buna paralel olarak bu çalışmanın devamı olabilecek mantıklı bir yaklaşım da gerçek hava araçlarının bir otopilotla yer kontrol istasyonu üzerinden kontrolü olabilir. Yer kontrol istasyonunun bu maksatla geliştirilmesi oldukça maliyet-etkin bir çözüm olabilir.
[1] J. M. M. Neto, L. R. L. Rodrigues, E. M. Moreira, J. C. J. dos Santos, and P. F. F. Rosa, “Uma miss˜ao de monitoramento para o projeto vantime: Operac¸ ˜ao regi˜ao serrana-rj,” AutoSoft, 2011, .
[2] C. A. P. Pinheiro, “Ve´ıculos a´ereos autˆonomos n˜ao-tripulados para monitoramento de ambientes desestruturados e comunicac¸ ˜ao de dados,” Master’s thesis, Instituto Militar de Engenharia, Rio de Janeiro, julho 2006.
[3] R. B. Maroquio, “Simublimp – uma contribuic¸ ˜ao ao desenvolvimento de algoritmos inteligentes para uma equipe de dirig´ıveis rob´oticos autˆonomos,” Master’s thesis, Instituto Militar de Engenharia, Rio de Janeiro, julho 2007.
[4] F. S. Vidal, “Sistema de navegacao para dirig´ıveis a´ereos n˜ao-tripulados baseado em imagens,” Master’s thesis, Instituto Militar de Engenharia, 2007.
[5] R. Garcia and L. Barnes, “Multi-UAV simulator utilizing x-plane,” J. Intell. Robotics Syst., vol. 57, no. 1-4, pp. 393–406, Jan. 2010.
[6] L. Barnes, M. Fields, and K. Valavanis, “Unmanned ground vehicle swarm formation control using potential fields,” in 15th Mediterranean Conference on Control & Automation, July 27 – 29 2007.
[7] T. Paul, T. R. Krogstad, and J. T. Gravdahl, “Modelling of UAV formation flight using 3d potential field,” Simulation Modelling Practice and Theory, vol. 16, no. 9, pp. 1453 – 1462, 2008.
[8] A. Meyer, X-Plane Operation Manual: www.xplane. com/files/manuals/X-Plane Desktop manual.pdf, Laminar Research, 5001 Radcliffe – Rd Columbia SC 29206, 2011, last updated on June 19, 2011.
[9] M. A. Goodrich, “Potential fields tutorial,” Class Notes, 2002.
[10] P. Hogan, “Nasa world wind: http://worldwind.arc.nasa.gov/java/,” National Aeronautics and Space Administration, 2011.
[i] Bu çalışmanın yaklaşımında İHA koordinatları birbirleri için engel olarak kabul edilmektedirler.






